
دوربین های حرارتی تحت شبکه و
معیارهای عملکرد برای تجزیه و تحلیل ویدیویی
1- چرا از دوربین های حرارتی استفاده می شود؟
دوربین های حرارتی برای موقعی که شما به قابلیت اعتمادی در حد 7/24 با آلارم های کاذب پایین نیاز دارید، انتخاب خوبی می باشند. این دوربین های دیداری در صحنه های تاریک وضوح خیلی خوبی دارند؛ انسان ها، اجسام و حوادث را در 24 ساعت روز، هفت روز هفته، تمام مکان های تاریک و حتی پارکینگ های آفتابی می توانند تشخیص دهند.
این دوربین ها به شرایط نوری مختلف مانند سایه، نورهای پس زمینه، تاریکی و حتی اشیای مات حساس می باشند. دوربین های حرارتی در شرایط دشوار هوا مانند دود، مه، گرد و غبار و نور زیاد، می توانند فعال باشند. از آنجایی که این دوربین ها دارای نور اضافی نمی باشند، آلودگی نوری نداشته و مصرف بهینه انرژی را در بردارند.
از آنجایی که دوربین های حرارتی می توانند تفاوت های بسیار کوچک را در تغییر رنگ تشخیص دهند، ترکیب کردن اشیا و انسان ها با رنگ زمینه کار دشواری می باشد.
بنابراین، دوربین های حرارتی در تشخیص انسان هایی که در رنگ های پیچیده زمینه یا در سایه های بسیار عمیق پنهان می باشند، بسیار عالی عمل می کنند. علاوه بر این، اشیایی مانند وسایل نقلیه که دارای طیف رنگ متفاوتی نسبت به محیط اطراف می باشند را، به سادگی تشخیص می دهد.
دوربین های حرارتی را می توان در گستره وسیعی از مکان های امنیتی مانند حفاظت محیط اطراف اماکن صنعتی، فرودگاه ها و نیروگاه ها مورد استفاده قرار داد. قابلیت تشخیص بسیار عالی این دوربین ها، آنها را به ابزاری ارزشمند در عملیات جستجو و نجات تبدیل کرده است.
به عنوان مثال، تصاویر زنده از یک دوربین حرارتی می تواند کاربر را از پرسه زدن یک انسان در اطراف اتومبیل های موجود در پارکینگ، قبل از رخ دادن هر اتفاقی مطلع سازد.
موقعی که بحث شناسایی توسط دوربین های حرارتی مطرح می شود، می توان موقعیت هایی را مثال زد که حریم خصوصی افراد بسیار اهمیت دارد؛ مانند مدارس. لازم به ذکر است، در بسیاری از کشورها، کاربران برای استفاده از ابزارهای ضبط کننده تصویر در اماکن عمومی، باید مجوزهای قضایی را دریافت نماید.
با این حال، مجوز این نوع استفاده از دوربین های حرارتی برای اماکنی که نیاز به حفاظت داشته باشند، به راحتی صادر می شوند.
دوربین های حرارتی نسبت به سایر دوربین های تصویر برداری می توانند تشخیص دقیق تر، تشخیص کنتراست های متفاوت و تشخیص حرکت اجسام را به کاربر ارائه نمایند. این امر باعث می شود که آلارم های کاذب کمتر رخ دهد و عملیات غیر ضروری توسط پرسنل نیز کاهش یابد.
این دوربین ها می توانند اطلاعات حرارتی را به تصویر اضافه کنند، به نحوی که امکان نظارت بر فرآیندها و رفتارهای غیر طبیعی در زمان تغییر درجه حرارت محیط، وجود دارد. به عنوان مثال، یافتن نشت گرما در ساختمان و تشخیص آخرین زمان روشن بوده یک خودرو توسط این دوربین ها امکان پذیر است.
علاوه بر این، یک دوربین حرارتی یک پلت فرم قابل اعتماد برای ادغام برنامه های تجزیه و تحلیل ویدئویی به شمار می آید. برای کسب اطلاعات بیشتر در مورد دوربین های حرارتی، به بخش 8 که دارای لینک های مفیدی می باشد، مراجعه نمایید.
2- مزایای استفاده از تجزیه و تحلیل ویدئویی
دوربین های شبکه ای حرارتی برای محافظت از محیط اطراف مانند نرده های مجازی، حساسیت تشخیص با هزینه ای کم، و همچنین افزایش امنیت ساختمان و مدیریت اضطراری مناسب می باشند. هوشمند سازی دوربین با استفاده از سیستم تجزیه و تحلیل ویدئویی که به عنوان یک افزونه می باشد، یک راه حل خودکار را، برای نظارت تصویری و تجزیه و تحلیل تصاویر ضبط شده میسر می نماید. دوربین های شبکه ای حرارتی، سیستم تجزیه و تحلیل را با دیگر دوربین های سیستم IP به اشتراک می گذارند و باعث بهبود کارایی و کیفیت ؟آن دوربین ها می شوند.
دوربین های حرارتی (َAxis) در کنار دیگر دوربین های تصویر برداری، توانایی تشکیل یک سیستم نظارت ویدئویی در حفاظت از محیط را، گسترش می دهند. در تصویر 1، شبیه سازی یک سیستم حفاظت محیطی نشان داده شده است. راه حل های حفاظت محیط اطراف بر اساس دوربین های حرارتی با نرم افزار تحلیل ویدئویی ساخته شده است.
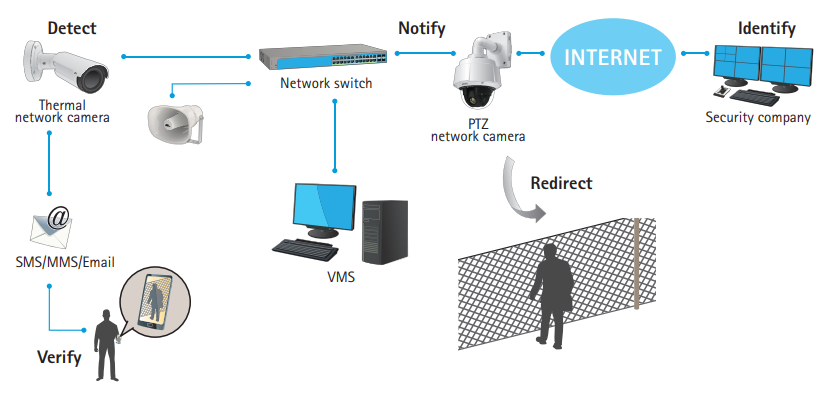
شکل 1. دوربین حرارتی اکسیز، که در سیستم حفاظت محیطی استفاده می شود.
با استفاده از تجزیه و تحلیل ویدئویی، یک دوربین حرارتی از لحظه ورود یک شخص به محیط تحت نظارت دوربین کنترل می شود، و این کنترل با حرکت دوربین در زوایای مختلف به همراه بزرگ نمایی تصویر در اختیار کاربر قرار می گیرد.
برای کسب اطلاعات بیشتر در خصوص تجزیه و تحلیل ویدئویی، بخش 8 که دارای لینک های مفیدی می باشد را ملاحظه نمایید.
3- محدوده تشخیص بر اساس معیارهای جانسون
وضوح مورد نیاز برای تشخیص یک شی، در پیکسل ها مشخص شده و با استفاده از معیارهای جانسون تعیین می گردد. جان جانسون، یک دانشمند نظامی آمریکایی بوده که این روش را در دهه 1950 برای پیش بینی عملکرد سیستم های حسگر ارائه داد. یک شی می تواند یکانسان باشد که با عرض کمینه 75/0 متر (46/2 فوت) یا یک خودو با طول کمینه 3/2 متر (55/7 فوت) تعریف می شود. جانسون توانایی ناظران برای تعیین اهداف مدل مقیاس را، در شرایط مختلف اندازه گیری کرد و معیارهای حداقل رزولوشن مورد نیاز را فراهم کرد. این معیارها می تواند پنجاه درصد احتمالات یک ناظر را در راستای تشخیص یک شی، مشخص نماید. بر اساس معیارهای جانسون، اختلاف دما بین شی و پس زمینه در حسگرهای حرارتی، باید حداقل دو درجه سانتیگراد (6/3 درجه فارنهایت) باشد. معیارهای جانسون برای دوربین های شبکه ای حرارتی (Axis) به شرح ذیل می باشد:
- اگر حداقل 5/1 پیکسل در تصویر مشخص شود، می توان گفت که یک شی در تصویر وجود دارد.
- اگر حداقل 6 پیکسل مشاهده شود، می توان گفت که یک فرد در مقابل حصار ایستاده است.
- اگر حداقل دوازده پیکسل مشاهده شود، می توان ویژگی هایی از شی را تشخیص داد؛ مثلاً شخصی که یک جفت دست دارد.
معیارهای جانسون با این فرضیه می باشند که یک ناظر انسانی در حال پردازش تصاویر باشد. در صورتی که اطلاعات توسط یک الگوریتم هوشمند مورد پردازش قرار بگیرند، الزامات خاصی در خصوص تعداد پیکسل های مورد نیاز برای افزایش قابلیت اطمنان مورد نیاز می باشد.
تمام الگوریتم های نرم افزارهای تجزیه و تحلیل ویدئویی به تعداد مشخصی از پیکسل ها برای تشخیص تضمینی نیاز دارند.
پس تعداد دقیق پیکسل ها در هر الگوریتم متفاوت می باشد. حتی گر یک ناظر انسانی قادر به تشخیص یک جسم در تصویر باشد، الگوریتم های هوشمند اغلب به تعداد پیکسل های بیشتری جهت تشخیص همان جسم دارند. برای پیدا کردن تعداد لازم پیکسل ها در یک محدوده مشخص شده، از یک علامت استفاده می شود.
3-1- نوموگرام
نوموگرام یک نمودار دو بعدی است که توضیح رابطه بین فاصله کانونی لنز، تعداد پیکسل ها در سراسر جسم و محدوده را نشان می دهد. برای مثال، اگر تعداد پیکسل های مورد نیاز و فاصله ای که یک شی از دوربین دارد را داشته باشیم، می توانیم توسط این نمودار بهترین لنز و دوربین را برای محیط انتخاب نماییم. همچنین، اگر نوع دوبین و تعداد پیکسل های مورد نیاز را داشته باشیم، می توانیم توسط نوموگرام، بهترین فاصله ای که می توان توسط دوربین تجزیه و تحلیل تصویر را انجام داد، به دست آورد.
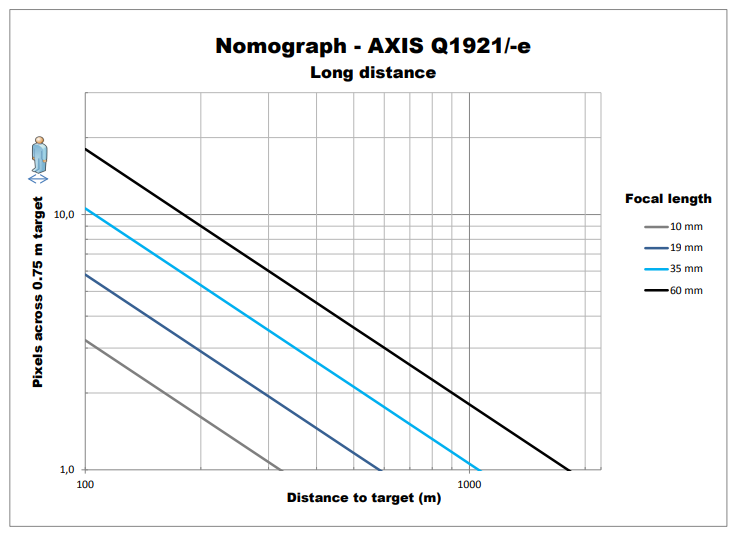
شکل 2. یک نمونه از نوموگرام
شکل 2 یک نمونه از یک نوموگرام را نشان می دهد. اگر فاصله کانونی 60 میلیمتر باشد، شئ قابل تشخیص (6 پیکسل در سراسر جسم) در 300 متری (328 یارد) می تواند قرار بگیرد (A). اگر فقط تشخیص شی مد نظر باشد (5/1 پیکسل در سراسر جسم)، محدوده مناسب 1200 متر (1.312 یارد) (B) می تواند باشد.
برای کسب اطلاعات بیشتر در خصوص تجزیه و تحلیل ویدئویی، بخش 8 که دارای لینک های مفیدی می باشد را ملاحظه نمایید.
4- ملاحظات زیست محیطی
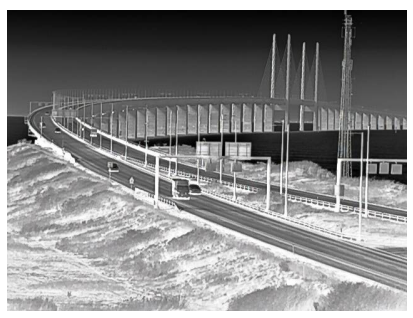
لازم به ذکر است که معیارهای جانسون، فقط در شرایط ایده آل زیست محیطی معتبر می باشند. شرایط آب و هوایی در محدوده قابل تشخیص، در دوربین های تصویر برداری معمولی و دوربین های حرارتی تاثیر گذار می باشند. محدوده قابل تشخیص در دوربین های حرارتی به شرایط آب و هوایی وابسته است. به عنوان مثال در یک روز با شرایط نامساعد آب و هوا، محدوده تشخیص در این دوربین ها کمتر می شود. به شکل 3 نگاه کنید.

شکل 3. تصویر دوربین حرارتی (سمت چپ) و دوربین تصویر برداری بصری (سمت راست) در یک روز مه آلود
محدوده قابل تشخیص که در نمودار نوموگرام مورد استفاده قرار می گیرد، نیاز به حداقل اختلاف دو درجه سانتیگراد بین شی و پس زمینه دارد. با وجود اینکه شرایط آب و هوایی می تواند تاثیرات منفی بر روی حرارت تصویر به وجود آورد، دوربین های حرارتی با تنظیم حرارت می توانند نتایج مطلوب تری را در تشخیص انسان و وسایل نقلیه در بر داشته باشند. پردازش تصویر پیشرفته با تقویت کنتراست تصویر، به دوربین کمک می کند که اختلاف های دمای هر چند کوچک، باز هم قابلیت تشخیص وجود داشته باشد.
مهمترین عواملی که می تواند بر عوامل جوی محیط اثر گذار باشد، جذب و پراکندگی می باشند. این دو تابش حرارتی که به دوربین می رسد را کاهش می دهند و در نتیجه فاصله ای که دوربین می تواند یک شی را تشخیص دهد، کمتر می شود. پراکندگی تاثیر بیشتری نسبت به جذب دارد.
4-1- جذب
بخار آب (H2O) و دی اکسید کربن (CO2) موجود در هوا، علل اصلی جذب می باشند. در طول فرآیند جذب، حرارت از منبعی که تشعشع می یابد در بخار آب و دی اکسید کربن موجود در هوا جذب می شود و انرژی خود را تا قبل از رسیدن به لنز دوربین از دست می دهد موجود است، حتی در لحظه ای که آفتاب می تابد و بخار آب موجود در هوا بالا می باشد، می تواند بر کیفیت تصویر تاثیر گذار باشد. موقعی که مقدار بخار آب موجود در هوا کمتر باشد، اشعه های حرارتی کمتری توسط مولکول های آب جذب می شوند و تصاویر واضح تری به دوربین های حرارتی می رسد. در نتیجه وضوح تصویر نسبت به روزهایی که بخار آب بیشتری در هوا وجود دارد، بالاتر می باشد.
4-2- پراکندگی
در فرآیند پراکندگی، تابش حرارت از جسم در هنگام پخش ذرات در هوا، پراکنده می شود. از دست دادن تابش مستقیم به اندازه و غلظت ذرات، قطرات و کریستالهایی که موجب ایجاد آلودگی در هوا شده اند (مانند، دود، مه، باران یا برف)، بستگی دارد.
4-2-1- دود، مه و غبار
هنگامی که بخار آب در هوا به قطرات آب تبدیل می شود، تورم ظاهر می شود. اندازه قطره ها با انواع مختلف مه متفاوت است. با توجه به افزایش قطرات آب، مایع متراکم[1] بزرگتر می شود. بنابراین نور مه از حرارت جسم بیشتر می شود. علاوه بر این، در اثر افزایش حجم و غلظت قطرات آب، دود موجود در هوا بیشتر از حرارت تصویر می شود. یک فرد که در دوربین حرارتی در هوای مه آلود دیده می شود، ممکن است در دوربین های بصری، نامرئی به نظر برسد. به شکل 4 نگاه کنید.

شکل 4. تصاویر شخصی که با دوربین حرارتی (سمت چپ) دوربین بصری (سمت راست) در یک روز مه آلود گرفته شده است.
دوربین های حرارتی عمدتاً در محدوده طول موج مادون قرمز (LWIR) کار می کنند. به طور کلی، انتقال طول موج LWIR در شرایط هوایی دارای ذرات مه و دود، در مقایسه شبا طول موج های قابل مشاهده، بسیار بهتر است. در اکثر موارد، طول موجهای کوتاه توسط ذرات به سطح بالاتری از طول موج LWIR جذب می شوند. همانگونه که در کلاس های I و II در جدول 1 دیده می شود، این امر محدوده تشخیص دوربین های تصویربرداری را نسبت به گرمای حرارتی کاهش می دهد. در کلاس III، مه بسیار متراکم است که حتی طول موج LWIR جذب و پراکنده می شود. در این شرایط تفاوت بین دوربین های تصویربرداری و حرارتی تقریباً غیر قابل ملاحظه می باشد.
جدول 1. طبقه بندی محدوده تشخیص
|
کلاس |
وضوح |
LWIR |
|
I |
1220 متر |
9/5 تا 1/10 کیلومتر |
|
II |
610 متر |
4/2 کیلومتر |
|
III(a) |
305 متر |
293 متر |
|
III(b) |
92 متر |
87 متر |
این جدول به عنوان یک مرجع استفاده می شود. البته محدوده تشخیص واقعی یک دوربین به عوامل دیگری مانند اشیاء فیزیکی در صحنه، تفاوت دما بین شی و پس زمینه و نصب فیزیکی دوربین بستگی دارد.
4-2-2- باران و برف
با وجود اینکه قطرات باران بزرگتر از قطرات مه هستند، غلظت آنها کمتر می باشد. پس باران نمی تواند تابش حرارتی را تا آنجا که مشاهده می شود، پراکنده نماید. سطح پراکندگی در برف، بین محدوده مه و باران قرار دارد. برف پراکندگی بیشتری نسبت به باران دارد، در صورتی که برف خشک بیشتر شبیه به مه عمل می نماید جدول 2 نمونه هایی از ضعف های تقریبی در شرایط مختلف آب و هوایی را نشان می دهد.
جدول 2. اختلالات در شرایط آب و هوایی
|
باران شدید |
باران ملایم |
آلودگی شهری |
مه غلیظ |
مه |
|
11 دسیبل/کیلومتر |
4 دسیبل/کیلومتر |
5/0 دسیبل/کیلومتر |
80 دسیبل/کیلومتر |
10 دسیبل/کیلومتر |
|
6/17 دسیبل/مایل |
4/6 دسیبل/مایل |
8/0 دسیبل/مایل |
128 دسیبل/مایل |
16 دسیبل/مایل |
به عنوان مثال، دوربین حرارتی با لنز 60 میلیمتر که در بخش 3-1 مورد استفاده قرار گرفت، در حدود 300 متری (328 یارد) با 6 پیکسل می تواند هدف را تشخیص دهد. این هدف در روز مه آلود به میزان 10 دسیبل/کیلومتر یا 1 دسیبل در 100 متر کاهش می یابد، که در مجموع موجب کاهش 3 دسیبل از وضوح تصویر می شود. تضعیف 3 دسیبل بدین معنی است که تنها پنجاه درصد از انرژی خروجی از جسم به حسگر حرارتی دوربین می رسد، که در نتیجه یک سیگنال ورودی ضعیف تر به دست می آید. یک سیگنال ورودی پایین تر، یک تصویر شلوغ و بی کیفیت را نتیجه می دهد؛ زیرا نسبت سیگنال به نویز کاهش یافته است. پردازش تصویر این افت سیگنال را تا حدودی برطرف خواهد کرد، اما تصویر همچنان اطلاعات کمتری را در اختیار کاربر قرار می دهد. کنتراست تصویر پایین تر است و باعث می شود که کاربر برای تشخیص در خطوط و سطوح مسطح دچار مشکل شود. تضعیف سیگنال باعث کاهش کارایی دوربین و قابلیت اطمینان برنامه های کاربردی تجزیه و تحلیل ویدیو می شود.
بنابراین از نصب و راه اندازی یک دوربین به صورت تنها در چنین محیطی باید اجتناب کرد. بهتر است که از چندین دوربین برای پوشش فاصله های دورتر استفاده شود. این عملیات تعداد پیکسل های مورد نیاز جهت تشخیص تصویر را بالاتر می برد و در نتیجه قابلیت اطمینان را بهبود می بخشد. همچنین تضمین می نماید که انرژی خروجی از اجسام کافی باشد.
باران و رطوبت هوا نه تنها پراکندگی در تابش، بلکه تفاوت دما در پس زمینه تصویر را تحت تاثیر قرار می دهد. یک دمای پایه سطح باعث کاهش کنتراست پس زمینه در دوربین های حرارتی می شود.
در حالی که پراکندگی باعث می شود انرژی کمتری به حسگر حرارتی دوربین برسد و دمای پایین تری از سطح زمین به حسگر تاثیر بگذارد. در نتیجه، از آنجا که کنتراست تصویر پایین می باشد، جزئیات کمتری از پس زمینه دیده می شود و تصویری زیباتر به چشم می خورد. همانطور که در شکل 5 دیده می شود، کنتراست بین شخص گرم و پس زمینه سرد، باعث تشخیص ساده تر افراد در دوربین های حرارتی می شود.

شکل 5. تصویری از افراد در روز بارانی با دوربین حرارتی (سمت چپ) و دوربین های بصری (سمت راست)
در یک روز ابری، کنتراست در پس زمینه کاهش می یابد، در صورتی که در روز آفتابی این مقدار افزایش می یابد. تفاوت دما با میزان مواد مختلف موجود در هوا تغییر می کند. شکل 6 یک نمونه از کنتراست دما را در یک روز آفتابی نشان می دهد.
شکل 6. کنتراست شفاف در پس زمینه در یک روز آفتابی
5- ملاحظات نصب
در موقع نصب دوربین های حرارتی حرارتی باید مواردی را در نظر گرفت. برای دستیابی به بهترین نتیجه در هنگام تشخیص افراد، باید دمای پس زمینه تا حدی خنک تر یا گرم تر از افراد معمولی یا دیگر افراد موجود در صحنه باشد. با این حساب، یک شخص مزاحم از پس زمینه جداسازی می شود.
در منطقه مورد نظر باید یک خط دید نسبت به دوربین بدون هیچگونه مزاحم یا شی مسدود کننده ای در نظر گرفت؛ مانند پرچم فلاپینگ در شکل 7. صحنه باید دارای یک یا چند شی قابل تشخیص باشد. به عنوان مثال، یک دودکش در فراز ساختمان باعث گرم شدن ساختمان نسبت به هوای بیرون می شود و همیشه ساختمان را قابل تشخیص می کند.
مطمئن شوید که هیچ شاخه درخت، پرچم یا شی مشابهی در هنگام وزش باد به درون صحنه پس زمینه وارد نمی شود. دوربین باید به طور محکم و ثابت نصب شود و لبه های دوربین با فاصله ای مناسب از پس زمینه تصویر قرار بگیرند. لبه های تصویر ممکن است یک آلارم حرکتی را در هنگام حرکت دوربین در باد به وجود آورند. از آنجا که دوربین در حال حرکت است، حتی اگر حرکت از خود دوربین باشد، تصویر تغییر یافته را به عنوان حرکت تشخیص می دهد و آلارم پخش می شود.
دوربین های حرارتی با پشتیبانی از تثبیت کننده تصویر الکترونیکی کمتر تحت تأثیر ارتعاشات قرار می گیرند. با این وجود در هنگام نصب این دوربین ها باید این موارد را در نظر گرفت تا عملکرد بهینه تری از دوربین به دست آید.
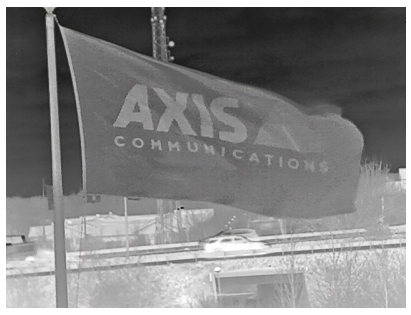
شکل 7. علامت نادیده گرفتن دید
[1] متراکم سازی فرآیندی است که توسط بخار آب موجود در ابرها، قطرات آب را توسط ذرات خارجی ایجاد می کنند.