
ضبط پلاک
عوامل کلیدی برای موفقیت در تشخیص پلاک خودرو
ژوئن 2021
خلاصه
ضبط پلاک (LPC)، قابلیت دوربین در ضبط تصاویر قابل خوانش پلاک ها می باشد و از آن در سیستمهای تشخیص پلاک (LPR) استفاده می شود، با این سیستم ها، پلاک ها به طور خودکار توسط نرم افزارهای تجزیه و تحلیل شناسایی و خوانده می شوند تا اقداماتی همچون کنترل، مدیریت پارکینگ یا ثبت عوارض در حین سرعت بالا در بزرگراه ها عملیاتی شوند.
میزان تشخیص و دقت یک سیستم LPR بستگی به کیفیت تصاویر گرفته شده دارد. دوربین های تخصصی LPC به طور پیش فرض دارای تنظیماتی هستند که برای بهینه سازی ضبط پلاک خودرو و به حداقل رساندن اندازه تصویر مورد نیاز انتخاب شده است. در این دوربین ها، همه چیز از فیلتر نویز (صدا) و دستکاری تا تمرکز خودکار و تعویض روز و شب در سناریوهای واقعی ترافیک در فضای باز مجدداً ارزیابی و مورد آزمایش قرار گرفته است. LPC به تنظیمات مختلف دوربین نیاز دارد البته این تنظیمات شامل بسیاری از برنامه های کاربردی دیگر نمی شود، بنابراین استفاده از یک دوربین LPC اختصاصی، راهی برای صرفه جویی در وقت و انجام اقدامات اساسی می باشد.
رزلوشن (وضوح) بالا بخش مهمی از کیفیت تصویر است. برای ضبط پلاک، رزلوشن تصویر باید به حدی بالا باشد که مشکل خوانش حروف و ارقام جداگانه را حل کند - حداقل دو پیکسل در کوچکترین ساختار باید باز شود - اما نه آنقدر زیاد که حجم داده های تصویر، باعث کند شدن در تحلیل نرم افزار شود. به خصوص هنگامی که نرم افزار LPR مستقیماً روی دوربین اجرا می شود، وضوح تصویر معمولاً نباید بیشتر از 2 مگاپیکسل باشد.
اگر از دوربین LPC تخصصی استفاده نمی کنید، روشنایی، نصب و تنظیمات دوربین نیاز به توجه خاصی دارد. برخی از مهمترین توصیه ها عبارتند از:
- از نور مصنوعی IR (مادون قرمز) در شب استفاده کنید. این نور برای چشم نامرئی است و رانندگان را خیره نمی کند.
- در صورت نیاز به استفاده از منبع نور خارجی، آن را تا حد امکان نزدیک دوربین قرار دهید. این به این دلیل است که پلاک ها نور را مستقیماً به همان جایی که از آن آمده است منعکس می کنند. دوربین های Axis LPC دارای نور IR یکپارچه و بهینه هستند.
- زاویه بین دوربین و مسیر حرکت خودرو را به حداقل برسانید، به طوری که پلاک ها رو به رو مشاهده شوند. زاویه کلی کمتر از 30 درجه توصیه می شود.
- دوربین را طوری قرار دهید که پلاک ها را در فاصله ای که برای سرعت مورد انتظار خودرو مناسب است ضبط کند. در سرعت بالاتر خودرو لازم است که از فاصله بیشتری پلاک ثبت شود، زیرا ممکن است سیستم قبل از خارج شدن خودرو از دید دوربین، زمان خواندن پلاک را نداشته باشد. محدودیتهای اعمال شده توسط عمق میدان دوربین و برد IR نیز باید در نظر گرفته شود.
- برای جلوگیری از تار شدن حرکت، حداکثر زمان شاتر را محدود کنید. زمان توصیه شده برای شاتر بستگی به تراز بودن دوربین و همچنین سرعت وسایل نقلیه دارد.
- برای جلوگیری از نمایش خیره کننده پلاک، دسترسی حداکثری دوربین را محدود کنید.
- مقدمه
ضبط پلاک (LPC) قابلیت دوربین برای ثبت تصاویر پلاک های قابل خواندن است. این یک پیش نیاز برای شناسایی پلاک (LPR) است که در آن پلاک ها به طور خودکار توسط نرم افزار تجزیه و تحلیل پیدا شده و خوانده می شوند.
میزان تشخیص و دقت یک سیستم LPR به شدت به کیفیت تصاویر گرفته شده بستگی دارد. به عنوان اولین گام در این زنجیره، دوربین LPC باید در طول روز و شب و در شرایط مختلف آب و هوایی تصاویری از پلاکها را با وضوح و شفافیت کامل ارائه دهد.
این وایت پیپر (مقاله سفید) اجزای کلیدی مورد نیاز برای ضبط پلاک را از لحاظ انتخاب سخت افزار، نصب و پیکر بندی توضیح می دهد. بخش 3 دوربین های LPC تخصصی Axis را معرفی می کند که کیفیت تصویر برتر را ارائه می دهند و نصب و راه اندازی را ساده سازی می کنند. در بخشهای 5 ، 6 و 7 مراحل لازم برای تصویربرداری از پلاکها با دوربین های Axis شرح داده شده است.
- پس زمینه
تشخیص پلاک (LPR) کاربردهای زیادی از جمله کنترل، مدیریت پارکینگ و عوارض با سرعت بالا در بزرگراهها دارد.
LPR از اواسط دهه 1970 به نوعی در دسترس بوده است و تا همین اواخر محدود به سیستم های بزرگ و گران قیمت بود. با توسعه سریع دوربین های شبکه، سیستم های LPR ارزان تر و انعطاف پذیرتر می شوند و طیف وسیعی از برنامه های کاربردی را امکان پذیر می کنند.
بسیاری از نام ها و علامت های اختصاری برای سیستم هایی استفاده می شود که کم و بیش معادل تشخیص پلاک هستند: تشخیص اتوماتیک پلاک (ALPR)، تشخیص اتوماتیک شماره پلاک (ANPR)، شناسایی اتوماتیک خودرو (AVI)، تشخیص پلاک خودرو (VLPR)، شناسه تشخیص خودرو (VRI)، تشخیص صفحه پلاک خودرو (CPR)، پلاک خوان خودرو (CPR) و غیره.
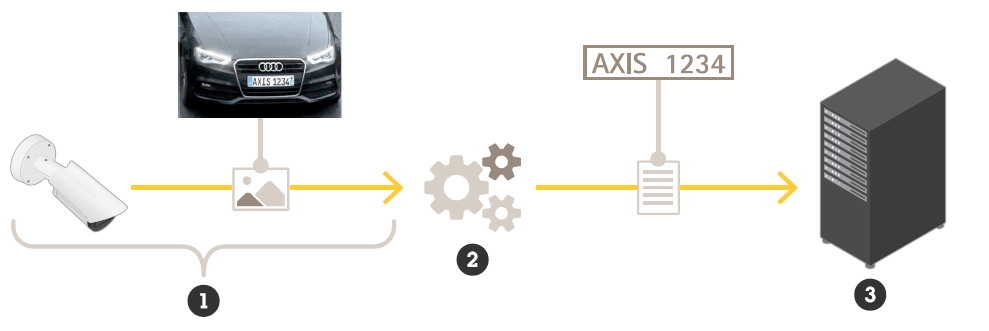
شکل 1. قسمتهایی از سیستم LPR: 1. ثبت پلاک، 2: الگوریتم نرم افزار، 3: پایگاه داده یا اقدام
یک سیستم LPR شامل یک یا چند دوربین است که تصاویر پلاک ها را ضبط می کند(ضبط پلاک). تصاویر با نرم افزار تجزیه و تحلیل پلاک که مستقیماً روی دوربین یا سرور از راه دور اجرا می شوند، پردازش میشوند. نرم افزار LPR بطور خودکار پلاک ها را در زمان واقعی پیدا می کند و می خواند. شماره پلاک های شناسایی شده را می توان در پایگاه داده برای استفاده های بعدی ذخیره کرد یا می توان از آنها برای ایجاد اقدامات، به عنوان مثال، باز کردن یک گیت استفاده کرد.
در حالت ایده آل، سیستم LPR باید تمام پلاک های عبوری را پیدا کرده و آنها را به درستی بخواند. کیفیت تصویر از دوربین برای سرعت و دقت بالای تشخیص بسیار مهم است. هیچ الگوریتمی، هر چند پیچیده، نمیتواند یک پلاک را از تصویری بخواند که پلاک مذکور روی آن به وضوح قابل مشاهده نیست.
برای تشخیص موفقیت آمیز پلاک ها، دوربین باید در یک موقعیت قرار گرفته و به روشی نسبتاً مشخص تراز شود. علاوه بر این، LPC به تنظیمات متفاوت دوربین نسبت به بسیاری از برنامه های دیگر نیاز دارد. تنظیمات پیش فرض یک دوربین عمومی برای LPC مناسب نیست و دوربین نیاز به پیکربندی مجدد دارد. همه اینها نصب را بسیار مشکل می کند، مگر اینکه از دوربین اختصاصی LPC/LPR استفاده کنید.
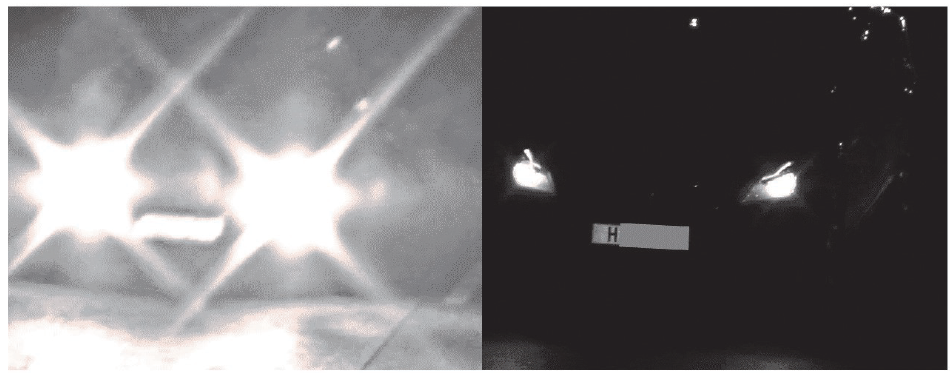
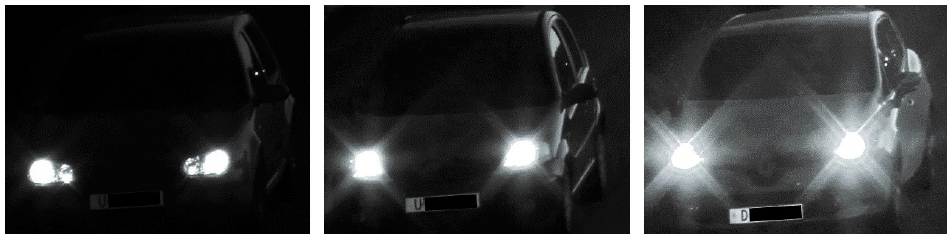
شکل 2. ضبط شبانه پلاک. چپ: با استفاده از دوربین پیکربندی اشتباه. راست: با استفاده از
دوربین های Axis LPC/LPR
دوربین های اختصاصی Axis LPC/LPR با توجه به شرایط سخت تاسیسات ترافیکی توسعه یافته اند. قطعات بر اساس مقاومت آنها در برابر آب و هوای بد، باد شدید و تغییرات دمایی انتخاب می شوند.
در دوربین های Axis LPC/LPR، بهینه سازی تصویر رضایت بخش تر از زمان شاتر و مزیت تنظیمات است. برای این دوربینها، بخش هایی مربوط به پردازش اساسی تصویر به ویژه برای LPC دوباره پیکربندی شده است. همه چیز، از فیلتر نویز و کنترل تا فوکوس خودکار و تعویض روز و شب، مجدداً ارزیابی شده و در سناریوهای واقعی ترافیک در فضای باز آزمایش شده است.
تنظیمات پیش فرض دوربین Axis LPC/LPR برای بهینه سازی ضبط پلاک خودرو و به حداقل رساندن میزان پیکربندی مورد نیاز انتخاب شده است.
دستیار ثبت پلاک یک ویژگی است که توسط Axis توسعه یافته است تا به شما در تراز و پیکربندی صحیح دوربین کمک کند.
هنگام تنظیم دوربین، دستیار اتوماتیک ضبط پلاک به شما بازخورد می دهد. این امر ممکن است زیرا دوربین می تواند جهت گیری خود را در میدان گرانشی اندازه گیری کند. دستیار زاویه عمودی دوربین، زاویه افقی دوربین و زاویه چرخشی را به طور مداوم به شما نشان می دهد و در صورت بزرگ بودن بیش از حد، آنها را با هشدار نمایش می دهد. همچنین فاصله ضبط را در زمان واقعی محاسبه می کند، یک پارامتر مهم که تخمین آن با چشم دشوار است.
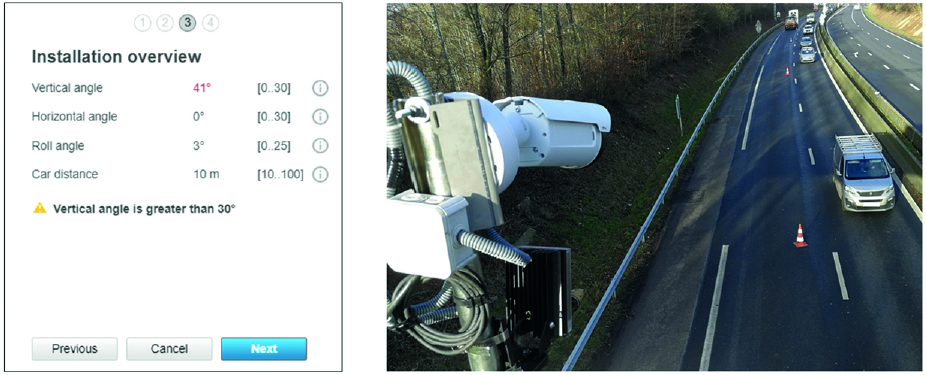
شکل 3. دستیار ضبط پلاک Axis از طریق مراحل نصب، کاربر را راهنمایی می کند و هنگامی که هر زاویه ای بیش از حد بزرگ باشد هشدار می دهد.
پس از اتمام تراز بندی، دوربین تنظیمات مناسب را برای صحنه خاص شما محاسبه می کند. در این حالت به راحتی میتوانید Apply را فشار دهید تا دوربین برای ثبت پلاک ها بهینه شود.
- تراکم پیکسلی
برای اینکه شماره قابل خواندن باشد، یک پلاک باید با پیکسل های کافی روی سنسور تصویر مشاهده شود تا حروف و ارقام جداگانه را از هم تشخیص داد. برای تشخیص تفاوت کامل بین خطوط سیاه و فضاهای سفید، باید حداقل دو پیکسل در کوچکترین ساختار که می خواهیم در تصویر باز شود وجود داشته باشد. برای یک پلاک استاندارد اروپایی، این بدان معناست که برای تشخیص خطوط جداگانه به 74 پیکسل در عرض کامل صفحه نیاز داریم. این حداقل پیکسل مورد نیاز برای باز کردن خوب شماره است و اکثر نرم افزارهای LPR به حدود 100 تا 150 پیکسل در عرض کامل صفحه نیاز دارند.
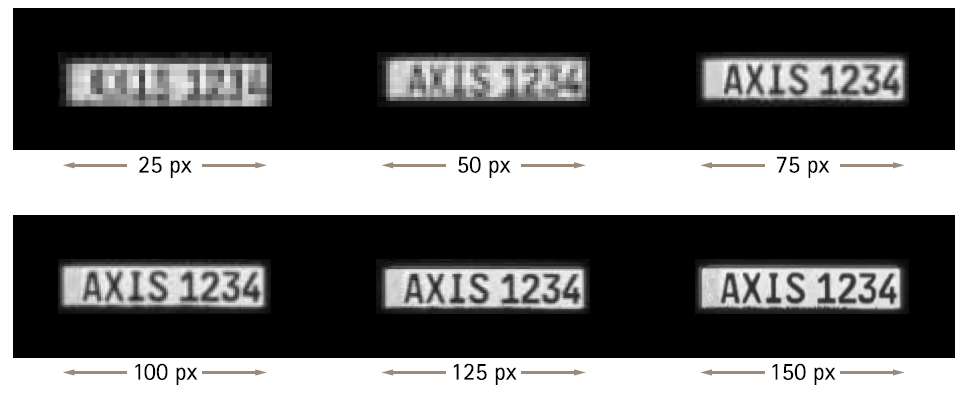
شکل 4. پلاک استاندارد اروپایی باید حداقل 75 پیکسل را پوشش دهد تا حروف با تمایز کامل تصویر در آیند. اکثر نرم افزارهای LPR به 100 تا 150 پیکسل روی عرض صفحه نیاز دارند.
از منظر دوربین تعداد پیکسل ها روی صفحه پلاک به وضوح سنسور تصویر و میدان دید بستگی دارد.
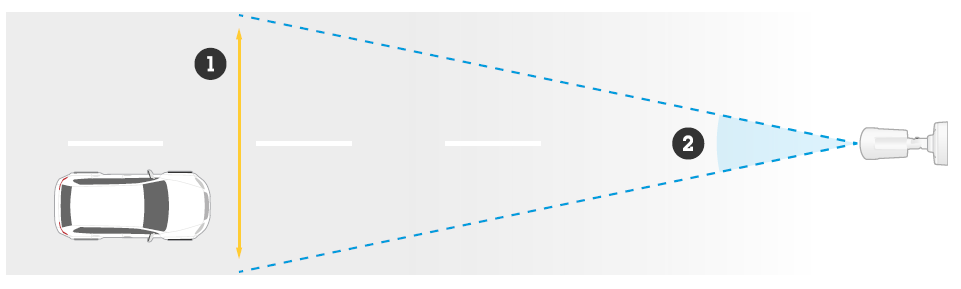
شکل 5. عرض صحنه (1) بستگی به میدان دید دوربین (2) دارد.
یک لنز متغیر[1] را می توان بزرگنمایی و کوچک کرد، که امکان انتخاب میدان دید را برای یک صحنه خاص می دهد.

شکل 6. تعداد پیکسل ها در عرض پلاک بستگی به وضوح دوربین و عرض صحنه دارد. در این مثال ، دوربینی با وضوح 1080x1920 پیکسل (چپ :) در یک خط (عرض 4 متر) بزرگنمایی می کند و (راست :) بزرگنمایی می کند تا تقریباً دو خط (عرض 6.5 متر) را پوشش دهد. پلاک به ترتیب 250 پیکسل و 154 پیکسل را پوشش می دهد.
میدان دید بستگی به فرمت سنسور و فاصله کانونی لنز دوربین و همچنین اعوجاج لنز دارد که بین لنزها میتواند تفاوت چشمگیری داشته باشد. در جدول اول، میدان دید افقی برای پوشش یک و دو خط در فواصل مختلف عکسبرداری توصیه شده است.
جدول 5.1. توصیه میدان دید افقی
فاصله عکسبرداری

جدول دوم حداقل رزولوشن (وضوح) توصیه شده سنسور برای پوشش یک و دو خط را نشان می دهد. توجه داشته باشید که این برای پلاک های استاندارد اروپایی است و پلاک های کوچکتر ممکن است به رزلوشن بالاتری نیاز داشته باشند.
جدول 5.2. حداقل رزولوشن (وضوح)

رزولوشن بالا این اشکال را دارد که نرم افزار LPR زمان زیادی طول می کشد تا هر تصویری را تجزیه و تحلیل کند. این امر در صورت تراکم ترافیک خطر از دست رفتن برخی از صفحات را افزایش می دهد. هنگام اجرای نرم افزار LPR به طور مستقیم بر روی دوربین، توصیه می کنیم از رزولوشن 2 مگاپیکسل یا کمتر استفاده کنید. استفاده از چندین دوربین برای پوشش خطوط بیشتر را در نظر بگیرید. همچنین رزلوشن توصیه شده مندرج در دفترچه راهنمای نرم افزار LPR را بررسی کنید.
نور IR (مادون قرمز)
ضبط شماره پلاک در شب نیاز به نور مصنوعی دارد. معمولا از نور مادون قرمز (IR) استفاده می شود زیرا برای چشم نامرئی است و رانندگان را خیره نمی کند. بیشتر پلاک ها دارای بازتاب IR هستند و نور مادون قرمز دید و کنتراست صفحه را در تاریکی یا هوای ابری افزایش می دهد. نور مادون قرمز می تواند از LEDهای تعبیه شده در دوربین یا از منابع IR که خارج از دوربین هستند تامین شود.
برد IR
شدت نور با افزایش فاصله تا منبع نور کاهش می یابد. برای یک جسم بازتابنده، مانند پلاک، این امر به این واقعیت منجر میشود که دو برابر شدن فاصله بین منبع نور و جسم به چهار برابر افزایش قدرت IR نیاز دارد تا جسم بتواند دید یکنواختی را حفظ کند.
تنظیم خاص دوربین که در طولانی ترین فاصله بتواند شماره پلاک را ضبط کند به قدرت IR موجود، زاویه IR و حساسیت به نور دوربین بستگی دارد. فناوری Axis OptimizedIR، زاویه IR مربوط به LED های یکپارچه دوربین برای هر سطح زوم را بهینه می کند. Axis Lightfinder دسترسی به LED های IR داخلی را به حداکثر می رساند و نیاز به منابع IR خارجی و منابع تغذیه اضافی را کاهش می دهد.
به دلیل اینکه شاتر زمان کوتاهی برای LPC نیاز دارد، دوربین نور کمتری نسبت به تنظیمات پیش فرض جمع آوری می کند. با این حال، بازتاب زیاد IR از پلاک باعث افزایش روشنایی صفحه می شود. در مجموع، هنگام استفاده از دوربین برای LPC (با زمان شاتر 500/1 ثانیه)، میزان برد مشخص شده IR حدود 50 درصد کاهش می یابد. این امر در مورد دوربین های تخصصی LPC که به طور پیش فرض زمان نوردهی کوتاهی دارند و بر همین اساس مشخص شده اند، صدق نمی کند.
برای یک دوربین عمومی Axis، برد IR با تنظیمات پیش فرض (معمولاً حداکثر شاتر 30/1 ثانیه) و برای اجسام غیر بازتابنده مشخص شده است. برای دوربین Axis LPC، برد IR با تنظیمات پیش فرض برای LPC (معمولاً حداکثر شاتر 500/1 ثانیه یا کمتر) و برای پلاک های بازتابنده مشخص شده است.
6.2. منابع خارجی IR
اگر میزان برد IR با LED های داخلی کافی نیست، یا اگر یک دوربین دارای LED های IR داخلی نیست، میتوان از منابع خارجی IR برای دوربین استفاده کرد. مخروط نور مربوط به منبع IR باید در سطح زوم با میدان دید دوربین مطابقت داشته باشد.
پلاک ها از مواد بازتابنده مجدد ساخته شده اند، به این معنی که آنها نور را مستقیماً به همان جایی که از آن آمده بازتاب می دهند، مهم نیست که نور در چه زاویه ای به صفحه برخورد می کند. هنگام استفاده از منبع خارجی IR، نور منعکس شده IR به سمت منبع خود باز می گردد.
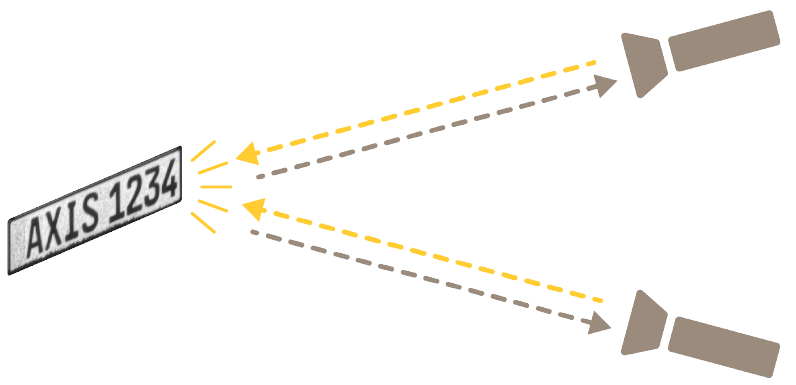
شکل 7. پلاک ها بازتابنده های مجدد هستند. آنها نور را به همان جایی که از آن آمده است منعکس می کنند.
به همین دلیل، منابع خارجی IR باید نزدیک دوربین قرار گیرند تا نور منعکس شده واقعاً به دوربین برخورد کند. روشنایی و کنتراست (تفاوت بین روشن ترین و تاریک ترین بخش های تصویر) پلاک در دوربین با دور شدن منبع IR از دوربین به سرعت کاهش می یابد.
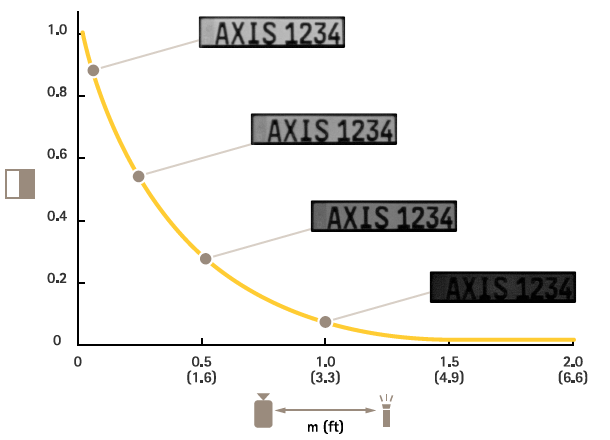
شکل 8. کنتراست نسبی پلاک در فاصله 10 متری، به عنوان تابعی از فاصله (عمود بر جاده) بین دوربین و منبع خارجی IR.
منبع IR باید به موازات دوربین تراز شود و از تابش نور در قسمتی از جاده که در میدان دید دوربین قرار دارد اطمینان حاصل کنید.
- نصب و راه اندازی
نصب دوربین اغلب یک مرحله مهم است زیرا بعداً انجام مجدد آن دشوار است. قبل از اقدام به نصب دوربین، باید مدتی را صرف درک معایب آن و برطرف کردن آنها کنید.
دستیار ضبط پلاک Axis ابزاری است که برای کمک به نصب، ترازبندی و تنظیم دقیق یک صحنه ترافیکی خاص توسعه یافته است. این می تواند با نمایش زاویه ها و فواصل مربوطه در زمان واقعی، شما را راهنمایی کند و در صورت بهینه نبودن تراز دوربین هشدار دهد.
1-7. موقعیت دوربین
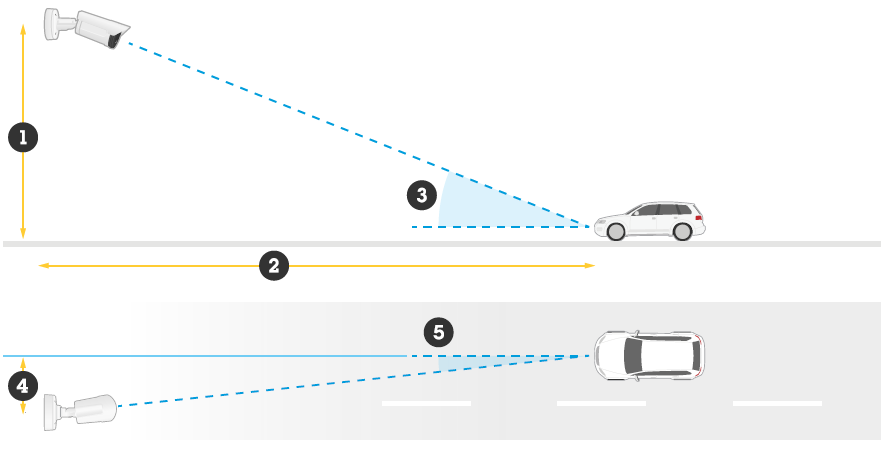
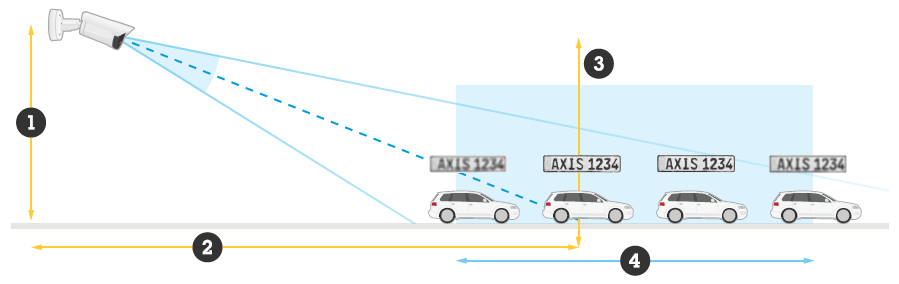
شکل 9. ارتفاع پایه (1) و فاصله ضبط (2)، زاویه عمودی (3) بین دوربین و جهت حرکت خودرو را تعیین می کند. فاصله از مرکز جاده (4)، زاویه افقی (5) بین دوربین و جهت حرکت خودرو را تعیین می کند.
توصیه می شود که زاویه بین دوربین و جهت حرکت خودرو را به حداقل برسانید تا پلاک ها کم و بیش رو به رو مشاهده شوند. در حالت ایده آل، باید دوربین را مستقیماً بالای خودروها و نه خیلی زیاد قرار دهید (فاصله جاده =0 در شکل). با این حال، اینکه دوربین را بالاتر از چراغهای جلو خودرو قرار دهید ایده خوبی است تا از (به اصطلاح) کورکردن دوربین با نور قوی جلوگیری شود.
همچنین توصیه می شود از قرار دادن دوربین در نزدیکی سایر منابع نوری قوی مانند لامپ های خیابانی خودداری کنید. در غیر این صورت اینها می توانند با عملکرد نوردهی خودکار تداخل داشته باشند و باعث ایجاد تابش خیره کننده و بازتاب روشنایی شوند.
ضمیمه 2 جداول مقادیر محاسبه شده برای زاویه بین دوربین و خودرو را برای برخی از ارتفاعات رایج نصب، فاصله جاده ها و فاصله های ضبط ارائه می دهد.
2-7. ترازبندی دوربین
دوربین باید به سمت جاده نشانه گیری شود، به طوری که خطوط مربوطه در مرکز تصویر قرار بگیرند. تصویر باید بزرگنمایی شود تا تعداد خطوط مورد نظر را پوشش دهد اما نه بیشتر. زاویه چرخش دوربین باید به گونهای تنظیم شود که پلاک به موازات لبه های تصویر قرار بگیرد.

شکل 10. دوربین باید به گونه ای تراز شود که پلاک در موازات لبه تصویرقرار بگیرد.
فاصله بین دوربین و قسمت جاده ای که ضبط می کند، فاصله ضبط نامیده می شود. فاصله ضبط باید با دقت انتخاب شود زیرا از طرق مختلف بر امکان تشخیص پلاک ها تأثیر می گذارد. در بقیه این فصل، پارامترهای مختلفی را که بر انتخاب فاصله ضبط تأثیر می گذارند، مورد بحث قرار می دهیم.
1-2-7. عمق میدان
دوربین باید کاملاً روی پلاک ها فوکوس کند تا واضح و خوانا باشند. با این حال، تصویر نه تنها در یک فاصله خاص، بلکه در محدوده وسیعی از فواصل اطراف صفحه کانونی واضح است. اندازه این محدوده را عمق میدان (DOF) می نامند.
شکل 11. 1: ارتفاع، 2: فاصله یا فاصله کانونی، 3: صفحه کانونی، 4: عمق میدان. عمق میدان محدوده اطراف صفحه کانونی را تعیین می کند که در آن تصویر هنوز به طور قابل قبولی واضح است.
عمق میدان (DOF) را می توان با کاهش اندازه دیافراگم عنبیه افزایش داد. در دوربین های Axis، تنظیم عنبیه به طور خودکار برای سطح نور فعلی بهینه می شود و معمولاً نیازی به تغییر آن نیست. کاهش دیافراگم عنبیه باید با احتیاط انجام شود، زیرا آن، عملکرد نور پایین دوربین را محدود می کند.
2-2-7. محدوده قابل تشخیص
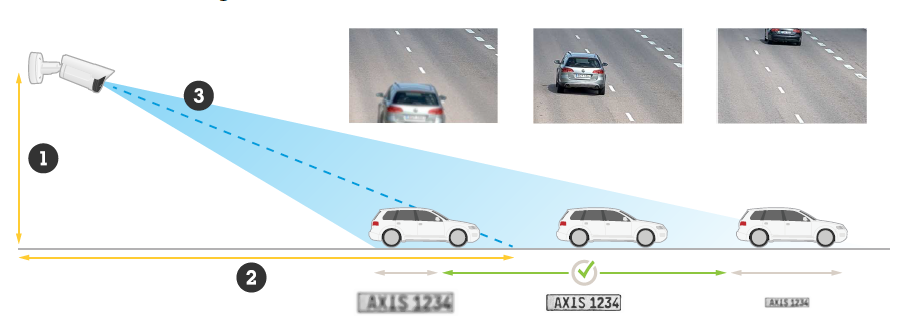
شکل 12. محدوده قابل تشخیص را می توان با عمق میدان و رزلوشن محدود کرد. 1: ارتفاع، 2: فاصله ثبت (فاصله کانونی)، 3: زاویه دید عمودی
محدوده قابل تشخیص محدوده ای از مسافت ها در طول جاده است که در آن پلاک خودرو در تصویر قابل مشاهده و خوانا است. در حالت ایده آل، محدوده قابل تشخیص، میدان دید کامل دوربین است، اما همیشه اینطور نیست. محدوده قابل تشخیص را می توان با عمق میدان دوربین محدود کرد و وسایل نقلیه ای که در فاصله های دور هستند گاهی آنقدر کوچک هستند که به خوبی توسط سنسور تصویر نشان داده نمی شوند.
شرایط آب و هوایی مانند برف، باران و مه می تواند دید را در فواصل طولانی ثبت پلاک به شدت محدود کند و بنابراین محدوده قابل تشخیص را کاهش دهد.
در هنگام روز و در شرایط خوب آب و هوایی، محدوده قابل تشخیص با افزایش بیشتر مسافت ضبط، افزایش مییابد. برای وسایل نقلیه ای که با سرعت بالا حرکت می کنند، لازم است از یک مسافت طولانی برای ضبط استفاده کنید تا زمان کافی برای خواندن پلاک قبل از خروج خودرو از میدان دید داشته باشید.
3-2-7. فاصله توصیه شده برای ثبت
جدول 7.1. حداقل فاصله ضبط برای سرعت های مختلف خودرو
فاصله توصیه شده برای ضبط سرعت خودرو
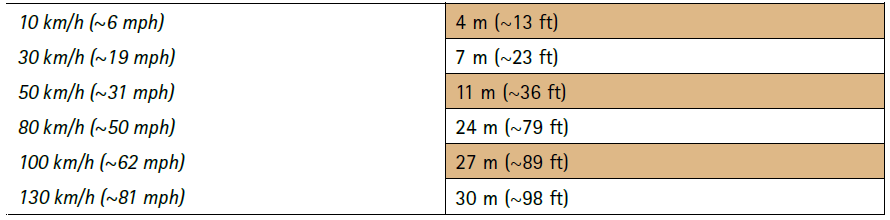
حداقل فاصله توصیه شده برای ضبط بستگی به سرعت وسایل نقلیه دارد. اعداد جدول بندی شده بر اساس زمان برآورد شده برای تشخیص که 0.2 ثانیه است درج شده اند، به این معنی که نرم افزار تجزیه و تحلیل LPR می تواند پنج فریم در ثانیه را تجزیه و تحلیل کند. توجه داشته باشید که تعداد فریم های تجزیه و تحلیل شده در ثانیه می تواند بین نرم افزارهای مختلف LPR و پردازنده های مختلف متفاوت باشد و همچنین به رزلوشن تصاویر بستگی دارد. جدول فقط یک راهنما است.
در هنگام شب، حداکثر فاصله ممکن برای ضبط اغلب با برد IR محدود می شود. برد IR را می توان با استفاده از منابع قوی تر خارجی IR بهبود بخشید.
- تنظیمات دوربین
وقتی صحبت از ضبط پلاک به میان می آید، تنظیمات دوربین تفاوت زیادی ایجاد می کند. دوربین های پلاک تخصصی با تنظیمات پیش فرض مناسب تحویل داده می شوند و به حداقل تنظیم نیاز دارند. در مورد دوربین های دیگر، تنظیمات زیر ممکن است نیاز به تغییر داشته باشد.
1-8. حداکثر زمان شاتر
وسایل نقلیه ای که از طریق تصویر حرکت می کنند در صورت طولانی بودن زمان شاتر دوربین، باعث تار شدن حرکت می شوند. حداکثر زمان شاتر به تراز بودن دوربین و همچنین سرعت وسایل نقلیه بستگی دارد.

شکل 13. خودرویی که با سرعت زیاد حرکت می کند با زمان 30/1 ثانیه شاتر، به تصویر در می آید.
خودرویی که مستقیما به دوربین نزدیک می شود در تصویر به صورت عرضی حرکت نمی کند، فقط با نزدیک شدن بزرگتر می شود. این تأثیر اغلب ناچیز است. اما به محض ایجاد زاویه بین دوربین و جهت حرکت، خودرو به صورت عرضی در تصویر با سرعتی که به زاویه بستگی دارد حرکت می کند. سرعت عرضی باعث تاری حرکت در زمان عادی حدود 30/1 ثانیه ای شاتر می شود، بنابراین حداکثر زمان شاتر باید محدود شود.
جدول نشان می دهد که حداکثر زمان توصیه شده شاتر به زاویه بین دوربین و جهت حرکت خودرو و سرعت وسایل نقلیه بستگی دارد. زاویه دوربین را می توان از جداول در ضمیمه 2 برآورد کرد.
جدول 8-1. بسته به زاویه دوربین و سرعت خودرو حداکثر زمان شاتر توصیه می شود. 1 میلی ثانیه = 1000/1 ثانیه
سرعت ماشین
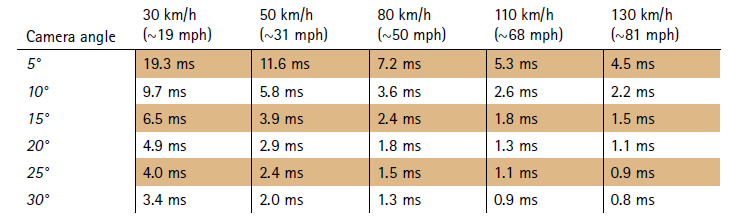
توجه داشته باشید که دوربین با زمان بیشتر شاتر، نور بیشتری را جمع آوری می کند که این امر باعث افزایش برد IR می شود. مثلا؛ با نصب دوربین در زاویه 5 درجه به جای زاویه 20 درجه، می توان زمان شاتر را تقریباً چهار برابر افزایش داد که باعث افزایش دو برابر محدوده IR می شود. محدوده IR در برگه اطلاعات دوربین Axis برای حداکثر پیش فرض شاتر دوربین مشخص شده است.
2-8. جذب حداکثری
از آنجا که پلاک از مواد بازتابنده ساخته شده است، هنگامی که در معرض نور شدید IR قرار می گیرد، به شدت درخشان می شود. محیط بسیار تاریک تر خواهد شد زیرا اجسام دیگر نور بسیار کمتری را منعکس میکنند. نتیجه می تواند این باشد که پلاک بیش از حد در معرض دید قرار می گیرد و خواندن آن غیر ممکن می شود.
ساده ترین راه برای جلوگیری از زیاد نور دادن پلاک، محدود کردن جذب حداکثری نور دوربین است. نحوه تنظیم جذب حداکثری نور بستگی به شدت IR موجود، فاصله تا وسایل نقلیه و حساسیت به نور دوربین دارد. زمانی که از IR داخلی دوربین Axis استفاده می کنید، بین 9 دسی بل تا 21 دسی بل نتایج معقول میگیرید.

شکل 14. تنظیم جذب حداکثری نور، نحوه قرار گرفتن پلاک در شب را تعیین می کند.
8.3. محدوده دینامیکی گسترده (WDR)
محدوده دینامیکی گسترده (WDR) شامل تکنیک های مختلف برای افزایش دامنه دینامیکی یک تصویر است. WDR برای بیرون آوردن جزئیاتی که در غیر این صورت در سایه ها پنهان می مانند یا جلوگیری از (به اصطلاح) کور شدن" دوربین در برابر نور قوی بسیار مفید است.
بسته به نحوه اجرای WDR در یک دوربین خاص، WDR می تواند باعث ایجاد مصنوعات حرکتی در تصاویر وسایل نقلیه متحرک شود. اگر مشخصات دوربین چیز دیگری نمی گوید، توصیه می کنیم همیشه WDR را برای ضبط پلاک خاموش کنید.
8.4. نگاشت طیف[2] و کنتراست
نگاشت طیف برای افزایش جزئیات در قسمت های تیره تصویر استفاده می شود. در صورت استفاده نادرست می تواند تابش نور چراغ های جلو و سر و صدا را افزایش دهد. توصیه می کنیم هنگام استفاده از دوربین برای LPC، میزان نگاشت طیف را کاهش دهید. در دوربین های قدیمی تر، نوار کشویی جداگانه ای در رابط دوربین وجود ندارد و این تنظیم از طریق نوار کشویی کنتراست محلی انجام می شود. توصیه می کنیم کنتراست محلی را در حدود 20 تنظیم کنید. در دوربین های جدیدتر که هم کشویی برای نگاشت طیف وجود دارد و هم کشوی کنتراست محلی، توصیه می کنیم کنتراست محلی را کمی بالاتر، در حدود 60 درصد تنظیم کنید، در حالی که نگاشت طیف را به 20 درصد کاهش دهید.
می توان از تنظیم کنتراست روی دوربین برای تاریک تر جلوه دادن تصویر در شب و در عین حال بیرون آوردن رنگ سفید از پلاک استفاده کرد. اگر بیش از حد تنظیم شود، ممکن است پلاک خودرو تاریک شود و در عوض چراغهای جلو اتومبیل ها را قرمز کند. توصیه می کنیم هنگام استفاده از دوربین برای LPC، کنتراست را با دقت تا حدود 60٪ افزایش دهید.
شکل 15. نگاشت طیف و کنتراست محلی، تعامل بین روشنایی و کنتراست روی پلاک خودرو، و نویز و خیره کنندگی زیاد در تصویر است.
توجه داشته باشید که برای دوربین های تخصصی LPC، این تنظیمات از قبل به طور پیش فرض برای LPC بهینه شده اند و نیازی به تغییر نیست.
- نرم افزار تشخیص پلاک خودرو
پس از ضبط جریان ویدئو پلاک ها، یک نرم افزار تجزیه و تحلیل خاص برای استخراج شماره پلاک از تصاویر مورد نیاز است. عملکرد سیستم LPR نه تنها به تنظیمات دوربین، بلکه به پیکربندی نرم افزار LPR نیز بستگی دارد. برای نرم افزارهای خاصی که مورد استفاده قرار گرفته اند به دفترچه راهنما مراجعه کنید.
نرم افزار LPR می تواند مستقیماً روی دوربین یا سرورهای راه دور اجرا شود.
اجرای نرم افزار LPR بر روی سرور از راه دور می تواند قدرت پردازشی زیادی را ارائه دهد، اما نیاز به پخش ویدئو در یک مکان از راه دور دارد که به پهنای باند شبکه بیشتری نیاز دارد. دشوار است که یک سیستم مبتنی بر سرور را در بسیاری از دوربین ها مقیاس بندی کنیم زیرا تعداد زیادی جریان ویدیویی به سرعت شبکه را مسدود می کند.
اجرای نرم افزار LPR به طور مستقیم بر روی دوربین به این معنی است که فقط حروف و ارقام پلاک باید از دوربین به سرور مرکزی ارسال شود (اگرچه خروجی اغلب شامل تصویر فوری از پلاک خودرو و نمای زمینه است). این امر الزامات پهنای باند شبکه را به حداقل می رساند. مقیاس بندی یک سیستم توزیع شده از این قبیل آسان است زیرا افزودن دوربین جدید نیازی به افزودن منابع دیگر به سیستم ندارد.
نقطه ضعف اجرای الگوریتم های LPR بر روی دوربین، قدرت پردازش محدود است که تجزیه و تحلیل هر تصویر را زمان بر می کند. این مسئله، حداکثر رزولوشن قابل استفاده را کاهش می دهد که تعداد خطوط قابل پوشش توسط هر دوربین را محدود می کند. با توسعه انواع جدیدی از تجزیه و تحلیل تصویر از طریق هوش مصنوعی و شبکه های عصبی، دوربین ها به طور فزاینده ای قدرتمند می شوند. الگوریتم های کارآمدتر و پردازنده های قوی تر، زمان لازم برای تجزیه و تحلیل هر تصویر را کاهش داده و سیستم های توزیع شده را به طور فزاینده ای رقابتی می کند.
- پیوست 1: فیلترهای نوری
افزودن فیلترهای نوری به مسیر نور در دوربین می تواند تصویر را در برخی شرایط خاص بهبود بخشد. با این حال، آنها اغلب مقدار قابل توجهی از نور را مسدود می کنند که باعث کاهش عملکرد در نور کم و ایجاد نویز بیشتر در تصویر می شود.
1-10. فیلتر پلاریزه
یک فیلتر قطبنده یا پلاریزه که به درستی تراز شده است می تواند انعکاس سطوح صاف مانند شیشه جلو اتومبیل یا سطح جاده را کاهش دهد. به هر حال، این فیلتر از ورود 50 درصد کل نور به دوربین جلوگیری می کند و این ممکن است تأثیر قابل توجهی بر کیفیت تصویر داشته باشد. در این حالت بهبود دید پلاک ها بسیار محدود است. به همین دلیل، ما استفاده از فیلتر پلاریزه برای LPC را توصیه نمی کنیم. با این حال میتواند برای نظارت عمومی بر ترافیک مانند بهبود دید داخل خودرو، مفید باشد.
2-10. فیلتر IR-pass
یک فیلتر IR-pass نور مرئی را مسدود کرده و اجازه می دهد فقط نور IR به سنسور برسد. از آنجایی که پلاک، نور IR بسیار بیشتری نسبت به محیط اطراف منعکس می کند، تصویر تیره تر می شود و فقط پلاک به شدت می درخشد و این می تواند به الگوریتم های LPR برای پیدا کردن پلاک کمک کند. آن همچنین میتواند راهی برای بهبود تمرکز در شب باشد.
این فیلتر می تواند نور چراغهای جلو اتومبیل ها را مسدود کند تا از تابش خیره کننده و انعکاس در لنز جلوگیری کند. نور چراغهای جلوی LED در این روش بسیار کارآمد فیلتر می شود. از طرف دیگر چراغهای جلو هالوژن نور زیادی را در محدوده طول موج IR ساطع می کنند و این نور به طور موثری فیلتر نمی شود.
شکل 16. در سمت چپ: نور چراغهای جلوی LED توسط فیلتر IR-pass مسدود می شود که به طور موثری تابش لنز و نور سرگردان را کاهش می دهد. راست: نور چراغهای جلو هالوژن از طریق فیلتر IR-pass عبور کرده و باعث ایجاد خیره کنندگی لنز می شود. دو تصویر تقریباً همزمان، با تنظیمات و تراز یکسان، با استفاده از یک دوربین مجهز به فیلتر IR-pass گرفته شده است.
یک فیلتر IR-pass در حالت شب (فیلتر قطع IR خاموش است) می تواند میزان تشخیص و دقت را بهبود بخشد. هنگامی که IR خاموش است فیلتر باید حذف شود (در حالت روز، فیلتر قطع IR روشن است).
- پیوست 2: زاویه بین دوربین و ماشین
زاویه کل بین دوربین و جهت حرکت خودرو را می توان با فرمول های زیر محاسبه کرد.
فاصله عرضی بین دوربین و جاده:
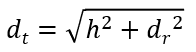
جایی که h ارتفاع نصب دوربین بر حسب متر و dr فاصله راه به متر است. زاویه بین دوربین و ماشین:
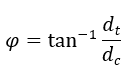
جایی که dt فاصله عرضی بر حسب متر بین دوربین و جاده است و dc فاصله ضبط بر حسب متر است.
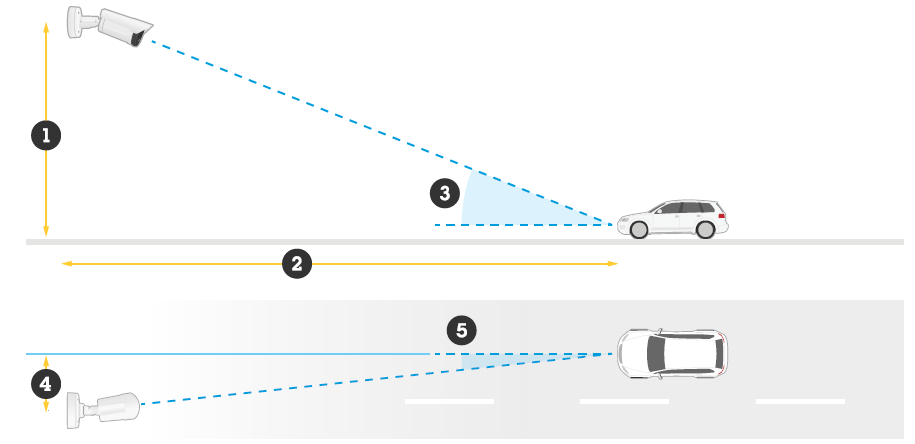
شکل 17. معادلات شامل ارتفاع نصب (1)h ثبت فاصله (2) dc و فاصله جاده (4) drاست.
توصیه می کنیم زاویه کل را زیر 30 درجه نگه دارید. در جداول زیر زاویه بین دوربین و خودرو برای برخی از ارتفاعات رایج نصب، فاصله جاده ها و فاصله های ضبط محاسبه شده است.
[1] . Varifocal
[2] . Tone mapping